Presentation Details
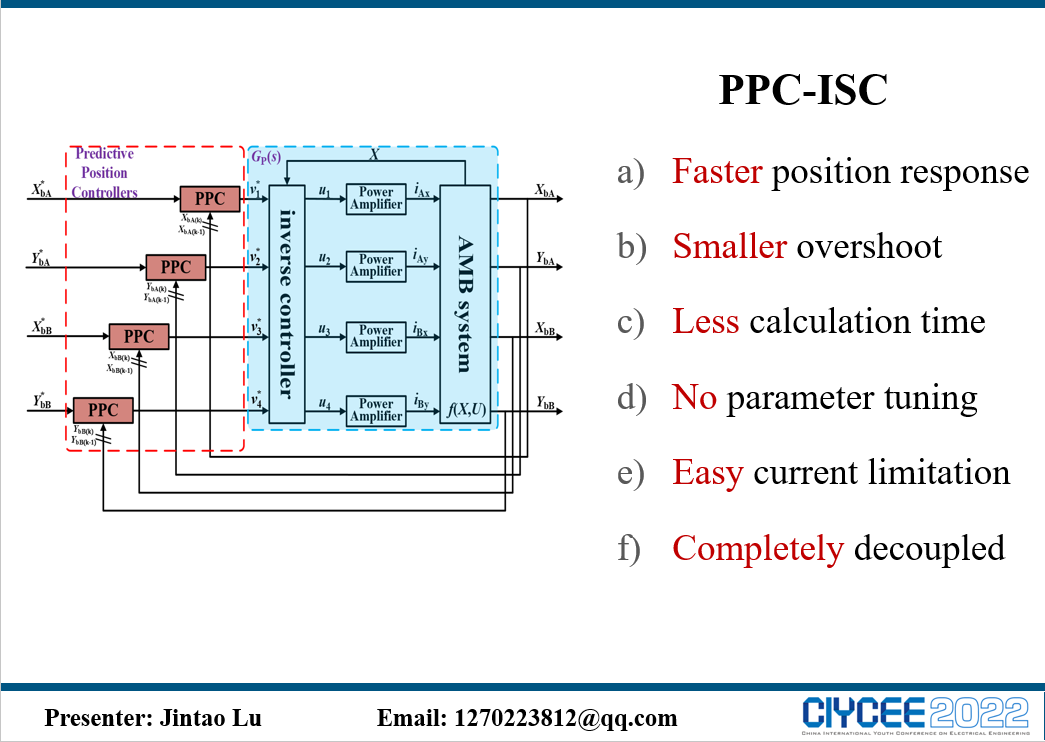
Position Predictive Control for Magnetic Bearing Flywheel System Based on Inverse System
ID:55
View Protection:ATTENDEE
Updated Time:2022-09-20 14:27:10
Hits:1176
Oral Presentation
Start Time:2022-11-04 08:30(Asia/Shanghai)
Duration:20min
Session:M Electric Machine Design and Control »
Video
No Permission
Presentation File
Tips: Only the registered participant can access the file. Please sign in first.
Abstract
This paper develops a novel predictive position control (PPC) based on inverse system method for fast response and high-performance operation which is applied to the active magnetic bearing (AMB) flywheel system. Due to the simplicity and lower-order of decoupling model based on inverse system control (ISC) method, the proposed controller could combine deadbeat and direct predictive control (DPC) expediently. Its performance is compared to conventional PID position control and PID-ISC. Simulation results have demonstrated modified characteristics including faster positon response, no parameter tuning and adjustable current constraints.
Keywords
predictive control (PC), inverse system method, active magnetic bearing, decoupling control
Speaker

Jintao Lu
Huazhong University of Science and TechnologySubmission Author
All Comments
Important Date
-
Conference Date
Nov 03
2022
toNov 05
2022
-
Aug 01 2022
Draft paper submission deadline
-
Nov 04 2022
Registration deadline
-
Nov 05 2022
Contribution Submission Deadline
Sponsored By
Huazhong University of Science and Technology
Contact Information
Previous Conferences
-
2026-10-29 China Wuhan
China International Youth Conference on Electrical Engineering -
2025-11-07 China Chengdu
China International Youth Conference on Electrical Engineeing -
2025-11-07 China Chengdu
2025 IEEE China International Youth Conference on Electrical Engineering (CIYCEE) -
2024-11-06 China Wuhan
China International Youth Conference on Electrical Engineering (CIYCEE 2024) -
2023-12-08 China Chengdu
4th China International Youth Conference on Electrical Engineering -
2023-12-08 China Chengdu
2023 IEEE 4th China International Youth Conference On Electrical Engineering (CIYCEE) -
2023-07-11 China Chengdu
2nd China International Youth Conference on Electrical Engineering -
2020-11-02 China Wuhan
China International Youth Conference on Electrical Engineering

Submit Comment